
Mit Hilfe von mehreren Mikrofonen soll die Position eines Sprechers erkannt werden.

Aus einem Video soll erkannt werden ob eine reale Person, ein Bild einer Person oder ein Tablet im Blickfeld ist.

Prof. Dr.-Ing. Norbert Schmitz
Professor für Robotik und Künstliche Intelligenz
Hochschule Pforzheim
Tiefenbronner Str. 65
75175 Pforzheim
norbert.schmitz@hs-pforzheim.de
Telefon: +49 7231 28 6701
Raumnummer: T2.2.17
Webseite der Hochschule Pforzheim
Online Hörsäle
| SHELLS : Shared Excellence - Laboratory Learning Spaces 4.0 | Stiftung Innovation in der Hochschullehre |
| KIHOME : Künstliche Intelligenz für die Anwendung im Smart Home | |
| SI-BW : Struktur- und Innovationsfonds für die Forschung | Ministerium für Wissenschaft, Forschung und Kunst Baden-Württemberg |
| Projektarbeiten | Moodle |
| Abschlussarbeiten | Moodle |
| CEN1021 Vorlesung Informationsmodelle / Oo. Software - Technik / ET ME | Moodle |
| MEC2121 Vorlesung Robotik ME WPF ET TI | Moodle |
| CEN1123 Labor Labor objektorientierte Software - Entwicklung ET ME | Moodle |
| CEN1122 Vorlesung Objektorientierte Software - Entwicklung ET ME | Moodle |
| CEN5031 Vorlesung Software-Engineering für eingebettete Systeme / Software Engineering MES | Moodle |
| MEC2171 Vorlesung Elektrische Antriebstechnik ME | Moodle |
| MEC2122 Labor Labor Robotik ME | Moodle |
keine Vorlesungen und Labore
| CEN2204 Programmieren in Tensorflow WPF ET TI ME MT | Vorlesung | Moodle |
| CEN1021 Informationsmodelle / Oo. Software - Technik / ET/IT / TI | Vorlesung | Moodle |
| MEC2121 Robotik ME WPF ET TI | Vorlesung | Moodle |
| CEN1123 Labor objektorientierte Software - Entwicklung / Os. Software - Technik / ET/IT /TI | Vorlesung | Moodle |
| CEN1122 Objektorientierte Software - Entwicklung / Oo.Software-Technik / ET/IT / TI | Vorlesung | Moodle |
| CEN5031 Software-Engineering für eingebettete Systeme / Software Engineering MES | Vorlesung | Moodle |
| MEC2171 Elektrische Antriebstechnik ME | Vorlesung | Moodle |
| MEC2122 Labor Robotik ME | Vorlesung | Moodle |
| MEC3437 Mobile Robotik Wahlfach ET TI ME MT | Vorlesung | Moodle |
| CEN1111 Einführung in die Informatik | Vorlesung | Moodle |
| CEN3255 Einführung in die künstliche Intelligenz | Vorlesung | Moodle |
| MEC5229 Intelligente Sensorsysteme | Vorlesung | Moodle |
| CEN1123 Labor objektorientierte Software-Entwicklung Nachholer | Vorlesung | Moodle |
| CEN1112 Labor Softwareentwicklung | Vorlesung | Moodle |
| CEN3256 Maschinelles Lernen | Vorlesung | Moodle |
| CEN5141 Robotik und Künstliche Intelligenz | Vorlesung | Moodle |
| CEN1092 Software-Entwicklung | Vorlesung | Moodle |
| Elektrische Antriebstechnik ME | Vorlesung | Moodle |
| Robotik ME WPF ET TI | Vorlesung | Moodle |
| Labor Robotik ME | Vorlesung | Moodle |
| Labor Objektorientierte Software - Entwicklung / Os. Software - Technik / ET/IT /TI | Vorlesung | Moodle |
| Software-Engineering Für Eingebettete Systeme / Software Engineering | Vorlesung | Moodle |
| Programmieren In Tensorflow WPF ET TI ME MT | Vorlesung | Moodle |
| Informationsmodelle / Oo. Software - Technik / ET/IT / TI | Vorlesung | Moodle |
| Objektorientierte Software - Entwicklung / Oo.Software-Technik / ET/IT / TI | Vorlesung | Moodle |
| Einführung in die Informatik / Grundlagen der Inf. / ETIT | Vorlesung | Moodle |
| Intelligente Sensorsysteme / Wahlfach MMS /MES | Vorlesung | Moodle |
| Labor Software-Entwicklung / Grundlagen der Inf. / ET/IT | Vorlesung | Moodle |
| Robotik und künstliche Intelligenz / Systementwicklung/ MMS | Vorlesung | Moodle |
| Software-Entwicklung / Grundlagen der Inf. / ETIT | Vorlesung | Moodle |
| Einführung in die künstliche Intelligenz / Wahlfach IT | Vorlesung | Moodle |
| Elektrische Antriebstechnik für Nachholer / El. Antriebstechnik / MEC | Vorlesung | Moodle |
| Informationsmodelle / Oo. Software - Technik / ET/IT / TI | Vorlesung | Moodle |
| Labor Software-Entwicklung / Grundlagen der Inf. / für Nachholer | Vorlesung | Moodle |
| Labor objektorientierte Software - Entwicklung / Os. Software - Technik / ET/IT /TI | Vorlesung | Moodle |
| Objektorientierte Software - Entwicklung / Oo.Software-Technik / ET/IT / TI | Vorlesung | Moodle |
| Software-Engineering für eingebettete Systeme / Software Engineering | Vorlesung | Moodle |
| Einführung in die Informatik / Grundlagen der Inf. / ETIT | Vorlesung | Moodle |
| Intelligente Sensorsysteme / Wahlfach MMS /MES | Vorlesung | Moodle |
| Labor Software-Entwicklung / Grundlagen der Inf. / ET/IT | Vorlesung | Moodle |
| Robotik und künstliche Intelligenz / Systementwicklung/ MMS | Vorlesung | Moodle |
| Software-Entwicklung / Grundlagen der Inf. / ETIT | Vorlesung | Moodle |
| Einführung in die Informatik / Grundlagen der Inf. / für Nachholer | Vorlesung | Moodle |
| Einführung un die künstliche Intelligenz / Wahlfach IT | Vorlesung | Moodle |
| Elektrische Antriebstechnik / El. Antriebstechnik / MEC | Vorlesung | Moodle |
| Intelligente Sensorsysteme / Wahlfach MMS /MES | Vorlesung | Moodle |
| Labor Software-Entwicklung / Grundlagen der Inf. / für Nachholer | Vorlesung | Moodle |
| Software-Entwicklung / Grundlagen der Inf. / ETIT für Nachholer | Vorlesung | Moodle |
| Software-Entwicklung / Grundlagen der Informatik / MEC | Vorlesung | Moodle |
| Einführung in die Informatik / Grundlagen der Informatik / MEC | Vorlesung | Moodle |
| Robotik und künstliche Intelligenz / Systementwicklung/ MMS | Vorlesung | Moodle |
| Labor Software-Entwicklung / Grundlagen der Inf. / MEC | Vorlesung | Moodle |
| Personenlokalisierung mit Mikrofonen Mit Hilfe von mehreren Mikrofonen soll die Position eines Sprechers erkannt werden. |
| Unterscheidung von realen Personen und Bildern durch optischen Fluss Aus einem Video soll erkannt werden ob eine reale Person, ein Bild einer Person oder ein Tablet im Blickfeld ist. |
 | Videobasierte Dart Spiel Analyse Im Rahmen des Projekts soll eine mit Hilfe eines Smartphones eine automatisierte Zählung für ein Dartspiel erstellt werden. |
 | Erkennung von Verkehrschildern aus Video Daten In Videos aus einem Auto sollen alle Schilder und Fahrbahnmarkierungen erkannt werden. |
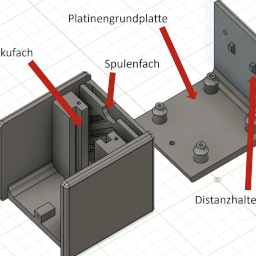
 | Aufbau einer Drohnen Arena Im Rahmen des Projekts soll einen Dronen Arena mit einem Schutzkäfig und C/C++ Schnittstelle aufgebaut und betrieben werden. |
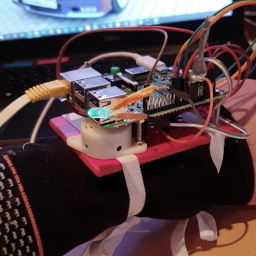
 | Prototypischer Entwurf und Aufbau einer Fernsteuerung für die drahtlose Bedienung von Smart Home Geräten auf Basis eines MEMS-Sensors (SS2020) In dem Projekt wurde ein kabelloser Würfel mit Batterie und Intertialsystem als Steuerung für das Smart Home entworfen. |
 | Design and creation of a deep learning network for the recognition of gestures and patterns based on data from a 9-axis inertial measurement unit (SS2020) Ziel des Projektes war die Erkennung von Interaktionen mit Inertialsystem mit Hilfe von Neuronalen Netzwerken. |
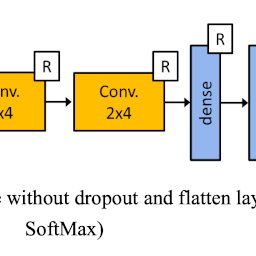
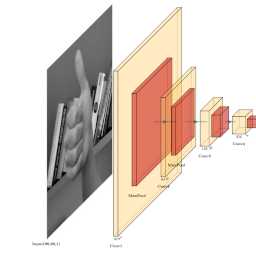 | Ein auf Convolutional Neural Networks basieren- des Verfahren zur echtzeitfähigen Klassifizierung von Handgesten (SS2020) Innerhalb des Projektes wurde auf synthetischen Daten eine Gestenerkennung mit Hilfe von CNN-Netzwerken trainiert. |
 | Evaluation of radar sensor data with neural networks to determine the posture of a person (SS2020) Im Projekt wurde ein neuronales Netz trainiert, das in der Lage ist aus einem Radarsensor einfache Bewegungen zu erkennen. |
 | Development of a system for detecting and distinguishing hu- man activity in the area of facility automation using thermal imaging cameras and artificial intelligence (SS2020) Im Projekt hat das Team eine Wärmebildkamera genutzt um die menschliche Position (liegend, sitzen, stehend) zu unterscheiden. |
Carlo Elwinger, Lukas Elwinger, Patrick Arnold, and Norbert Schmitz. Neural network based face mask detection using thermal imaging sensors. In DGAO Proceedings, volume 123, 2022. pdf
Karlheinz Blankenbach, Matthaeus Vogelmann, Norbert Schmitz. Advanced optical methods for safe image reproduction on automotive displays. Journal of the Society for Information Displays. 2021. https://doi.org/10.1002/jsid.1079
Jannis Schmidl, Nina Felicitas Heide and Norbert Schmitz. Domain Transfer in the Semantic Segmentation of 3D Point Clouds with Neuronal Networks. DAGM German Conference on Pattern Recognition. 2021.
N. Schmitz, T. Hager. Agentenbasiertes Energiemanagement - Skalierbare und flexible Energieverwaltung für private Haushalte. atp Magazin. Volume 61, Number 4, 2019.
M. Pancholi, S. Dimitrov, N. Schmitz, S. Lampe, and D. Stricker. Relative translation and rotation calibration between optical target and inertial measurement unit. In International Conference on Sensor Systems and Software. International Conference on Sensor Systems and Software (S-CUBE-16), 7th EAI International Conference on Sensor Systems and Software, December 1-2, Nice, France. Springer, 2017.
A. Filippeschi, N. Schmitz, M. Miezal, G. Bleser, E. Ruffaldi, and D. Stricker. Survey of motion tracking methods based on inertial sensors: a focus on upper limb human motion. Sensors - Open Access Journal (sensors), 17(6):1–40, 6 2017.
T. Schwartz, H. Krieger, I. Zinnikus, C. Bürckert, J. Folz, B. Kiefer, P. Hevesi, C. Lüth, G. Pirkl, T. Spieldenner, N. Schmitz, M. Wirkus, and S. Straube. Hybrid teams: flexible collaboration between humans, robots and virtual agents. In Matthias Klusch, Rainer Unland, Onn Shehory, Alexander Pokhar, and Sebastian Ahrndt, editors, Proceedings of the 14th German Conference on Multiagent System Technologies (Mates 2016). German Conference on Multiagent System Technologies (MATES-2016), September 27-30, Klagenfurt, Austria, volume 9872 of Lecture Notes in Artificial Intelligence, LNAI, pages 131–146. Springer, 9 2016.
C. Bailer, J. Henriques, N. Schmitz, and D. Stricker. A simple real-time eye tracking and calibration approach for autostereoscopic 3D displays. In Proceedings of the 10th International Conference on Computer Vision Theory and Applications. International Conference on Computer Vision Theory and Applications (VISAPP-15), 10th, March 11-14, Berlin, Germany. SCITEPRESS Digital Library, 2015.
S. Dimitrov, N. Schmitz, and D. Stricker. Standalone sound-based mobile activity recognition for ambient assistance in a home environment. In European Conference on Ambient Intelligence. European Conference on Ambient Intelligence (AmI-15), November 11-13, Athens, Greece, volume 9425, pages 349–352. Springer, International Publishing, 11 2015.
J. Köhler, T. Nöll, N. Schmitz, B. Krolla, and D. Stricker. Structure from motion in the context of active scanning. In Proceedings of the 10th International Conference on Computer Vision Theory and Applications. International Conference on Computer Vision Theory and Applications (VISAPP-15), 10th, March 11-14, Berlin, Germany. SCITEPRESS Digital Library, 2015.
L. Marin, R. Salesse, C. Bortolon, M. Gueugnon, Z. Zhao, R. Stéphane, D. Capdevielle, R. C. Schmidt, N. Schmitz, J. Henriques, D. Stricker, M. Di Bernardo, K. Tsaneva- Atanasova, P. Slowinski, C. Zhai, and B. Bardy. Does similarity promote social interaction in schizophrenia? In 18th International Conference on Perception and Action |. International Conference on Perception and Action (CPA-18), July 14-18, Minneapolis„ Minnesota, USA. Research Gate, 6 2015.
M. Miezal, B. Taetz, N. Schmitz, and G. Bleser. Ambulatory inertial spinal tracking using constraints. In Proceedings of the 9th International Conference on Body Area Networks. International Conference on Body Area Networks (Bodynets-09), October 29 - November 1, London, United Kingdom. o.A., 9 2014.
M. Miezal, G. Bleser, N. Schmitz, and D. Stricker. A generic approach to inertial tracking of arbitrary kinematic chains. In The 8th International Conference on Body Area Networks . International Conference on Body Area Networks (Bodynets-2013), 8th, September 30 - October 2, Boston, Massachusetts, USA. o.A., 2013.
S. Salehi Mourkani, G. Bleser, N. Schmitz, and D. Stricker. A low-cost and light-weight motion tracking suit. In IEEE International Conference on Ubiquitous Intelligence and Computing . International Conference on Ubiquitous Intelligence and Computing (UIC-2013), December 18-20, Vietri sul Mare, Italy. o.A., 12 2013.
J. Hirth, N. Schmitz, and K. Berns. Playing tangram with the humanoid robot ROMAN. In Proceedings of the German Conference on Robotics. German Conference on Robotics (ROBOTIK), 7th, located at in conjunction with the robotics exhibition AUTOMATICA 2012, May 21-22, Munich, Germany, pages 18–23. o.A., 5 2012.
N. Schmitz, J. Hirth, and K. Berns. A simulation framework for human-robot interacti- on. In Proceedings of the International Conferences on Advances in Computer-Human Interactions, pages 79–84, St. Maarten, Netherlands Antilles, February 10-16 2010.
N. Schmitz, G. Zolynski, and K. Berns. Human head pose estimation using multi- appearance features. In 33rd Annual German Conference on Artificial Intelligence (KI), number 36, Karlsruhe, Germany, September 21-24 2010.
K. Berns and N. Schmitz. Perception system for naturally interacting humanoid robots. Künstliche Intelligenz (KI), 1/09, 2009.
N. Schmitz, C. Spranger, and K. Berns. 3d audio perception system for humanoid robots. In The Second International Conferences on Advances in Computer-Human Interactions (ACHI), Cancun, Mexico, February 1-7 2009.
S. Strupp, N. Schmitz, and K. Berns. Visual-based emotion detection for natural man-machine interaction. In 31st Annual German Conference on Artificial Intelligence (KI), Kaiserslautern, Germany, 2008.
F.G. Pereira, N. Schmitz, R.F. Vassallo, and K. Berns. Gesture based interaction with the humanoid robot roman. In 3rd International Workshop on Intelligent Robotics (IROBOT), Lisbon, Portugal, October 14-18 2008.
N. Schmitz, J. Hirth, and K. Berns. Realization of natural interaction dialogs in public environments using the humanoid robot roman. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots (Humanoids), pages 579–584, Daejeon, Korea, December 1-3 2008.
N. Schmitz, J. Wettach, E. Deines, P. Dannenmann, M. Bertram, K. Berns, and H. Hagen. Simulation and visualization of indoor-acoustics for robot control. In 9th IASTED International Conference on Computer Graphics and Imaging (CGIM), Innsbruck, Austria, February 13-15 2007.
K. Mianowski, N. Schmitz, and K. Berns. Mechatronics of the humanoid robot roman. In Sixth International Workshop on Robot Motion and Control (RoMoCo), Bukowy Dworek, Poland, June 11-13 2007.
K. Mianowski, N. Schmitz, and K. Berns. Improvements of the performances of humanoid robot roman. In 13th IEEE IFAC International Conference on Methods and Models in Automation and Robotics (MMAR), Szczecin, Poland, August 27-30 2007.
J. Hirth, N. Schmitz, and K. Berns. Emotional architecture for the humanoid robot head roman. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), pages 2150–2155, Rome, Italy, April 11-13 2007.
N. Schmitz, J. Koch, M. Proetzsch, and K. Berns. Fault-tolerant 3d localization for outdoor vehicles. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 941–946, Beijing, China, October 9-15 2006.
N. Schmitz, M. Proetzsch, and K. Berns. Pose estimation in rough terrain for the outdoor vehicle ravon. In 37th International Symposium on Robotics (ISR), Munich, Germany, May 15-17 2006.
N. Schmitz. Satellitenortung und Sensorfusion zur Lokalisierung von Fahrzeugen in unstrukturierter Umgebung. Diploma thesis, unpublished, Robotics Research Lab - University of Kaiserslautern, December 2005.
N. Schmitz. Aufbau eines Regelkreises zur Druckregelung von Vakuumkammern bei einem Kletterroboter. Project Thesis, unpublished - Robotics Research Lab - University of Kaiserslautern, April 2005.